
Appendix D. The At Theory
The Augustus Barto O'Barr and Lola May Peppers FamilyHTML Version 2.0 copyright 1995 by Gerald L. O'Barr |
|
|
|
INTRODUCTIONToday, we use a "kinetic interaction" force theory. It is called the "ideal gas law." By making the assumption that gases are composed of atoms, and making assumptions about the collisions of these atoms, we can obtain the "P v = n R T" function. This tells us how "P," the pressure, which results in a force upon any exposed surface, is established due to simple, conservative, Newtonian collisions.This theory was (and still is) extremely successful. The atomic theory of matter, and that atomic collisions obeyed the conservational laws, have acted as a guide that can not be equaled. It was especially valuable when the complete understanding of atoms did not exist. But today we have gone much beyond atoms. We are now down to the parts that make up the atoms, and to space reaching forces that are not yet explainable by Newtonian physics. Newtonian physics, as understood today, cannot explain such forces as gravity, or electrical forces, or any of the long or short range nuclear forces. The At theory is a new "kinetic interaction" force theory which will help us explain these additional forces. It is Newtonian. It deals with a particle concept for our reality clear down to the lowest level of our reality. In future research efforts, it will play a similar role now played by the atomic theory of matter and the ideal gas law. It will establish the overall characteristics of all forces that can exist. This article is only a partial introduction to the theory, but it will introduce the basic concepts of forces. Therefore, for this article, the At theory is a proposed explanation of space reaching forces. Again, the ideal gas law cannot explain all forces: it can only explain "pressure" forces. No Newtonian explanation presently exists for space reaching forces, especially the attractive type of forces such as gravity. The At theory will give to Newtonian physics the power to explain these types of forces.
BASIC ASSUMPTIONSWhat is the lowest level of our reality? We of course do not know what the lowest level is. It might be near the lowest level that we now know, or, most likely, it might be many levels deeper. The At theory does take the position that there is a lowest level, and it makes certain assumptions about this lowest level. The lowest level must be as simple or simpler than all systems existing above it, and it must therefore be as simple or simpler than any thing that we can see or observe. Details of this approach will not be given in this article, but the significant results, as relating to forces, are presented.The At theory takes the view that all of reality is composed of particles. Down on the lowest level of this reality, there are no space reaching forces such as gravity, or electrical forces, or short or long range nuclear forces. These forces, along with all other space reaching forces, must therefore be ultimately explained as the results of certain interactions of particles. The At theory makes certain assumptions about these particles and the interactions that they can experience. The only interactions allowed in the At theory are collisions. In all collisions, conservation of mass, momentum and energy are strictly observed. Thus, again, the At theory could be called a "kinetic force" theory. In essence, the At theory claims that there is one grand mechanical system that explains all of our reality. It is a fact that the basic assumptions of the At theory, up to the collisions of the particles, contain all of the concepts of the "ideal gas law." The ideal gas law actually forms part of the At theory. The At theory can "split" into two or more different theories at the point where collisions occur. The ideal gas law comes from the collisions where the first solution set is used (where particles, in one-dimensional interactions, return or bounce back in the same directions from which they came.) The part of the theory that holds our attention in this article will relate to the second solution set that can be obtained from the collision equations. This will be called the At theory, even though the "ideal gas law" type of interaction, and others, are part of the total theory.
LIMITATIONSThere are many limitations to the At theory. These limitations are similar to the limitations in the atomic theory of matter or the ideal gas law. These present theories tell us something about all atoms and gases, they tell us little about any specific atom or gas. In this same way, the At theory will tell us little about any specific fundamental particle. It will not tell us details about gravitons or gluons. But it will outline some of the general principles and limitations of the actions of all fundamental particles. The ideal gas law is not always perfect. There are some gases and conditions where deviations from the law occur. These deviations do not invalidate the theory. The deviations can be attributed to limitations in the assumptions, not the mechanics. In the same way, there will be imperfections in the At theory. But again, these limitations will not be in the mechanics. Even though there are these many limitations, the At theory will eventually explain to us the generality of the uncertainty principle, Planck's constant, particle- anti-particle duality, relativity, the limit to the speed of light, the ether, all on a Newtonian basis. It will one day be the unification theory.
SIMPLIFICATIONSThis article will present the At theory in a very condensed form. We will show the principles of the At theory in a simple, one-dimensional setting. Although there are no theoretical limits as to the number of sizes of particles in our reality, we will use a system of only nine sizes (or mass) of particles. For this presentation, we will assign these sizes to be 99, 100, 101, 399, 400, 401, 799, 800, and 801 mass units. The unit for their mass remains unspecified. The 99, 100 and 101 mass of particles are classed as a type A, the 399, 400 and 401 are classed as type B, and the 799, 800 and 801 are type C particles. Thus we see that we have three basic sizes of particles. A, B, and C. Each of these three ranges or classes of particles consist of a below average, average and above average size.The A particles relative to B and C particles are very small. In mechanical systems where collisions are the basic interactions, such as in the ideal gas law, an "equal partitioning of energy" is observed. This exists in the At theory. This results in the lighter A particles having higher kinetic velocities than the higher mass particles. The lighter A particles are used as the "field" particles, and the heavier particles are the ones that are "acted upon" by the field particles. It will be the motions of the heavier particles that will be of interest to us in terms of forces. If two B particles, or two C particles, exposed to a field of A particles, find themselves being driven together, it will be said that an attractive force exists between them. If any two particles are driven apart, it will be said that they repel each other. This article is this simple. Interactions that can occur between A and B particles, and A and C particles, will be determined and/or specified. Pairs of B and C particles will then be exposed (by computer simulations) to a uniform, symmetrical exposure of type A field particles. The results of their overall motions will then be used to determine if a "force" exists. If overall accelerated motions between these particles can be established, we will have at least one, and the first, mechanical explanation or understanding of space reaching forces. We will have done this through a mechanical system that follows Newtonian physics. Knowledge of the ideal gas law will be useful, but hardly sufficient. The ideal gas law works through the first set of solutions which result on a "first order" transfer of momentum. This is done by a "bounce" where up to twice the momentum of the incoming particle can theoretically be transferred to the body that is hit. In the system that we will analyze, the momentum transfer is a second order transfer, and the net results must be obtained after a series of interactions have occurred. This makes it more difficult to follow or understand or conceptualize, but it is based upon the same type of mathematics upon which the ideal gas law is established.
HISTORICAL NOTESSuch efforts to create "forces" by mechanical or kinetic interactions have been tried before. Ever since Newton discovered that the earth was applying a force on the moon, almost all great men have tried to explain how this force could be. They have all failed. Not only did they fail to create the right kind of force: They failed to create any force at all. All previous theories, under conditions of symmetry, where conservation of mass, momentum and energy were followed, resulted in no net forces. No net forces were possible. 1,2 One of the best examples of this effort was done by a man who lived in the days of Newton named LeSage. 1,2 He came close, but it was his belief in God that resulted in his failure. He believed that the particles that he was considering were as eternal as the God who made them, and therefore, these particles were not susceptible to change in their collisions. Everyone else has followed his assumptions, to include us, until today.
THE MATHEMATICS FOR COLLISIONSSince this is an introduction of a new concept, we will present this new concept in the simplest possible way. We will do a one-dimensional development. With this simplicity, the mathematics can be developed in seven simple equations.We will assume a simple one-dimensional collision (a direct, central hit with no rotations) and require complete conservation of mass, momentum and energy. A body of mass m1, moving to the right (assumed to be the positive direction), with a velocity of V1, hits a body of mass M1 that has a velocity of U1. Following this collision, new bodies of mass m2 and M2 appear, with velocities of V2 and U2 respectively. For conservation of mass, we can write:
m1 + M1 = m2 + M2 . 1)
For conservation of momentum:
m1*V1 + M1*U1 = m2*V2 + M2*U2 . 2)
For conservation of energy:
1 2 1 2 1 2 1 2
-m1*V1 + -M1*U1 = -m2*V2 + -M2*U2 . 3)
2 2 2 2
Simultaneously solving these three equations for V2 and U2, we obtain:
---------
m1V1 + M1U1 +/- (V1 - U1) \/ M1M2m1/m2
V2 = ----------------------------------------- 4)
m1 + M1
and
- ---------
m1V1 + M1U1 + (V1 - U1) \/ m1m2M1/M2
U2 = ----------------------------------------- 5)
m1 + M1
We must now choose a solution. Also, we will introduce the variable "d," that represents the exchange of mass. The chosen solutions are:
---------
m1V1 + M1U1 + (V1 - U1) \/ M1M2m1/m2
V2 = ----------------------------------------- 6)
m1 + M1
---------
m1V1 + M1U1 - (V1 - U1) \/ m1m2M1/M2
U2 = ----------------------------------------- 7)
m1 + M1
Here, m2 has been replaced with "m1 - d", and M2 by "M1 + d." This maintains conservation of mass, but shows that there is really only one new variable being introduced. Also, if "d" is assumed to be small (which we do assume in this presentation), then it is easy to expand these equations in "d/m" and/or "d/M," to obtain approximate solutions if one cared to obtain such solutions.
DISCUSSIONS OF NEW EQUATIONSEquations 6) and 7) are the equations for which we seek. They are a solution set to equations 1), 2) and 3). Very few texts show the complete solution sets, equations 4) and 5), and fewer yet work with the set of solutions which we have chosen.It does need to be observed that m2 has a more positive velocity than M2. This means that m2, the body that is associated with m1 because of size (d being small), is now to the right of M2. This seems to indicate that m1 went through M1. What really occurs is a "spall." When m1 hits M1, it becomes a part of M1, and a piece of M1, opposite of the point of hit, breaks off and continues on in the same direction as the original m1. Figure 1 shows a collision between two bodies where a spall is produced. On this basic level, there are no losses of energy associated with these spalls. A spall does not have to be the same amount of mass as the particle that caused the spall. Therefore, the spall concept provides a reasonable means for an exchange of mass between interacting bodies. It allows a solution that provides for a more free movement of bodies through space. It also provides for certain momentum exchanges that will allow Newtonian particles to produce other results found in Quantum Mechanics. The conservation of mass requires only that the total sum of mass remains equal. By allowing the mass of the individual bodies to change in mass, we have found an additional degree of freedom in our equations. This additional degree of freedom will allow us to do things that could not be done before. It also presents us with a complete set of solutions, which includes a solution set that has not been used before. In the old way of collisions, where only a specific, not the general conservation of mass relationship is allowed, where no exchange of mass occurs (d=0), the square root function disappears, and a linear equation appears. With linear equations, no net forces are possible in kinetic interactions. When "d" is finite, there exists nonlinear equations, and net forces can now exist. If one wants to get into off-handed comments, you could say that for 400 years we have dealt with only one-half of physics. The other half of the set of solutions will just now begin to be considered.
APPLICATIONS OF EQUATIONSHaving these new equations are meaningless without knowing how to use them. Some general principles will now be established. We will assume that there is a background of particles that are moving throughout space with reasonably random distributions in their directions, speeds, mass, energies, momentums, etc. They are too small to be individually discerned. Existing within this background of particles are larger particles that can be more readily observed. These larger particles are interacting with the background particles. Up to here, we are closely following the thoughts of LeSage. Some general principles follow from assuming that all interactions are spall type interactions as expressed in equations 6) and 7). These kinds of interactions, where mass can be exchanged ("d" has a finite value), mean that one body must increase in mass, and the other body must decrease in mass. If these are stable bodies, then by necessity, in some following interaction, the exchange of mass must be such that the opposite occurs, where these particles are returned to their original mass values. Now this return does not have to occur at once, or even in every collision, but only within some range of magnitude and numbers of collisions so that there is established some norm to their mass. If we assume that stability also exists in the background, and the background is the results of spalls, then certain balances must exist between the spalls and the background. Therefore, spalls can only be the type of particles that exist in the background, or saying the same thing, the background can only consist of the particles that are produced by spalls. The mix or ratio of particle types must also be identical. Using this kind of logic, the following can be said:
EXAMPLE OF A FORCE FIELDA simple example would now be helpful to give us a better understanding of some of these concepts. We will describe a simple, one-dimensional field.We establish a line with a left boundary at 0 and a right boundary at 4000 unit distance. At the left boundary we will have field particles enter with the following masses, velocities and times:
mass velocity time of entry
-------------------------------------------------
1) 100 100,000 0.125
2) 100 100,000 0.250
3) 101 100,000(100/101)^1/2 0.625
4) 99 100,000(100/99 )^1/2 0.750
The positive velocities mean that they are moving to the right. This cycle of four particles is repeated continuously with a fixed time of one time unit between each repeating particle. On the right boundary, we have the exact same particles enter except that their velocities are negative (they are moving to the left) and their times of entry are offset by 0.25 time units from each matched particle on the left. Thus, over large time intervals, a very complete symmetry is maintained in the field particles that enter the two boundaries of this line. It can be noted that the velocities of the 101 and 99 mass particles are slightly different than the 100 mass particles. This is done to give each particle an "equal partitioning of energy." It is known that when free particles are interacting with each other, this is a natural occurrence, and by doing this by assignment, it helps to maintain consistency in the rest of the interactions. If a computer program were written so that the field particles could reach equilibrium velocities, they would approach the ratio of velocities that are being assigned. One basic assumption for this article is that there are no mass exchanges between any of the field particles among themselves (d=0). The only mass exchanges are between field particles with the larger, stable particles that exist. We will now place upon this line two large particles of one or two types. We can then observe their interactions. If they accelerate towards each other, we will say that they attract each other; if they accelerate away from each other, we will say that they repel each other. The following table shows the masses for one of these large stable particles, and the mass ("d") that is exchanged when a collision occurs with one of the field particles:
399 400 401 (Mass of stable particle)
-----------------
Field 101 1 1 1
Mass 100 0 0 0
99 -1 -1 -1
The other large stable particle has the following exchanges:
799 800 801 (Mass of stable particle)
--------------------
Field 101 0 0 0
Mass 100 1 -1 -1
99 0 0 0
Some time can be spent in considering what all these tables might mean or include. These tables do control the spalls that these particles produce. The medium-mass-range particles (400 mass range) only allow spalls that are exactly a mass of 100. The largest-mass-range particles (800 mass range) allow only 101 or 99 mass spalls. It could be said that one particle decreases the dispersions seen in the background, the other particle increases the dispersions. These tables do allow for at least a form of stability for each of these particles. These tables also collectively reproduce the same mix of field particles that were assumed in the original field, exactly so if we assume that there are an equal number of these two types of particles. Although we are not going to discuss each of these points in this article, each of these points are important in obtaining the type of response that is desirable. To achieve some of these points, we had to pick some very particular values in these tables. However, just as with the velocities assigned, some of these relationships will be found to be automatic if we had a way of letting certain relationships go to equilibrium. Again, these points, even if important, do not have to be fully discussed in this article in order to observe the results.
RESULTSFigure 2 shows the results of the computer plot of two 800 mass particles. At time 0, the 800 mass particle on the left was placed on the line at point 1990 with a velocity of 3.6 units. The 800 mass particle on the right was placed at 2010 with a velocity of -3.6. A plot was made of the positions of these two bodies for 25 time units, and shown on a plot that extended from position 1940 to 2060.It is clearly demonstrated that an attraction appears to exist between these two bodies. Calculations of their average accelerations gave values of approximately 0.3136 +/- 0.001 units. Average accelerations were estimated by noting the successive changes in positions in two adjoining time periods, calculating the average velocity for each period, and then dividing the change in velocity by the time period average. Time periods equal to units of field cycle times were used. Forces were estimated by taking the acceleration and multiplying it by the initial particle mass. Since this is only a one-dimensional interaction, the force between these two bodies is fairly constant and does not vary with distance. In a three-dimensional set-up, the force should approach a force inverse to distance squared if the distance between them were large compared to their diameters. Figure 3 shows the actions of two 400 mass particles. They are plotted over the same plot boundaries and times as was used in Figure 2. The 400 mass particle on the left was started at position 1946 with a velocity of -8. The 400 mass particle on the right began at point 2052 with a velocity of 8. These two bodies are repelling each other. Their accelerations were calculated to be close to the values of 0.6230 +/- 0.0001 units. Considering that these two repelling bodies are one-half the mass of the two attracting bodies, it can be noted that the forces of attraction and repulsion are fairly equal to each other. The difficulty of making an exact measurement between these forces is obvious. Since the masses of these particles are constantly changing, some kind of time integration value would have to be sought. Also, since these particles are each moving back and forth on this line from 5 to 10 units, it is difficult to say, with high accuracy, what their acceleration might be. Again, some kind of averaging must be considered. None of these kinds of calculations were used in determining the above figures.
QUANTUM MECHANICS RELATIONSHIPSThe difficulties noted above are interestingly similar to certain quantum mechanical relationships. The 400 mass particles "jump around" more than the 800 mass particles, as would be expected in quantum mechanics. This indicates that they each had the same "h" value. The "h" value can be controlled by the number of impacts experienced per unit time, the velocity of the field particles, and the amount of mass exchanged in these interactions. Simple inspection shows that there are constant changes in the positions and velocities (and therefore momentums and energies) of these particles.The field particles could be identified as 100+d, 100+0, and 100-d. If one used the mass unit "d" as a particle, the "+d" state and the "-d" state could be seen as a particle, anti- particle relationship. By definition, the +d must be exactly opposite to -d. If one ignored the normal 100 mass units of the field particles, and only considered the "d's," you would have an exchange of "d" particles occurring between your interacting particles. You would then have, as desired, a "+d" mass, a "0" mass, and a "-d" mass particle system. Therefore, we see an uncertainty in the mass, in the position, in the velocities, momentum and energies for these particles. We can also see how a particle, anti-particle relationship could be conceptualized. There are many other relationships that can be considered. For example, in Newtonian physics, the linear kinetic energy of a particle, divided by its momentum, is one-half of its velocity. For a photon (a quantum mechanics particle,) its energy divided by its momentum is its velocity, c. This energy/momentum ratio is twice as large as is found in Newtonian physics. In Figure 1, we can take the change in velocity of M2, multiply this by its mass, and get the effective momentum that was transferred when the mass "d" was absorbed. If we associate this effective momentum with "d," we will get an energy, momentum ratio for the "d" particles to be the same as for photons. Also, in the reactions of a 400 mass particle to a 800 mass particle, a mechanism for explaining the spins of subatomic particles or the motions of photons might be shown ( Figure 4.)
UNEXPLORED CONCEPTSNo one should think that this is a very complete article. For example, the field particles used in this particular article used only one order of entry. For the four particles that we used in each of two directions, there are 10,080 different ordered combinations that could be used. They do not all produce the same results for both types of large bodies. There is also a choice of a random order, which has almost an unlimited range of combinations. We have only allowed fixed magnitudes of mass changes. What if we allowed the "d" value to vary? There are many ways to achieve stability in masses, and in controlling the spalls, and in establishing differences in the spalls produced by different "size" particles. And of course, we were only working in one-dimension space, without spins or other three-dimensional effects. The full acceptance of such a new theory would want to wait until some of these other aspects are considered.
CONCLUSIONSAs a quick review, the following has been done:
Each of the above, considered singularly by themselves, could be entirely incidental and of no real importance or meaning. But taken as a whole, they cannot be ignored. When a multitude of events are coincidental, occurring as natural and automatic as they are here, with out any force or effort, these are strong indications that there is something fundamental to the approach. It is obvious that this article is short and many concepts were not explored. It is important, however, to state one particular point. However close or far apart the forces described in this article approaches any known forces, an attractive force and a repulsive force have been demonstrated. If this has really been done, it is a first. This is the first successful description of an attractive force field based upon Newtonian physics with full compliance of symmetry and all the conservational laws. This is an important accomplishment, not only historically, but for our present advancement in certain theories of physics. All are encouraged to begin to consider this new and important concept.
REFERENCES1) Taylor, W. B., "Kinetic Theories of Gravitation," Smithsonian Institution Annual Report, 1876 (U.S. Government Printing Office, Washington D.C. 1877), pp 205-282.2) Stallo, J. B., "The Concepts and Theories of Modern Physics," reprint of the third American edition published in 1888, edited by P. W. Bridgman (Belknap Press of Harvard University Press, 1960) pp 92-94. |
FIGURE 1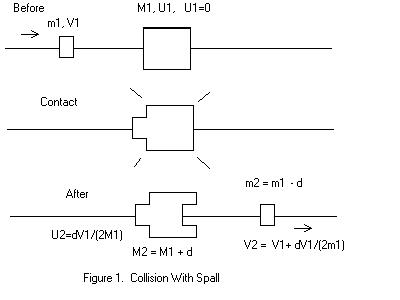 Return to article |
FIGURE 2
Figure 2. Attractive forces between two 800 mass bodies. |
FIGURE 3
Figure 3. Repulsive forces between two 400 mass bodies. |
FIGURE 4
Figure 4. Translational motion, 400 mass body chasing 800 body. |
